
Reflexions et idées pour le robot 2025
Les choses à changer pour 2025
Les PAMIs
Réduire la taille de la carte :
- Passer sur des ESP32 sans antenne intégrés
- Passer sur des batteries d’appareil photo - Exemple 1
Pour les connecteurs batteries LP-e6 :
- Connector identification
- Ref potentielle - Vérifier dimensions
- Ref potentielle - Vérifier dimensions
A priori c’est un connecteur custom pour Canon. Mais il semble y avoir des possibilités d’adaptation.
Pour le bouton d’arrêt d’urgence, il faudrait trouver une référence plus petite et plus legère. Une solution soudée sur PCB serait interessante. Eventuellement, utiliser un interrupteur et visser un bouton AU dessus.
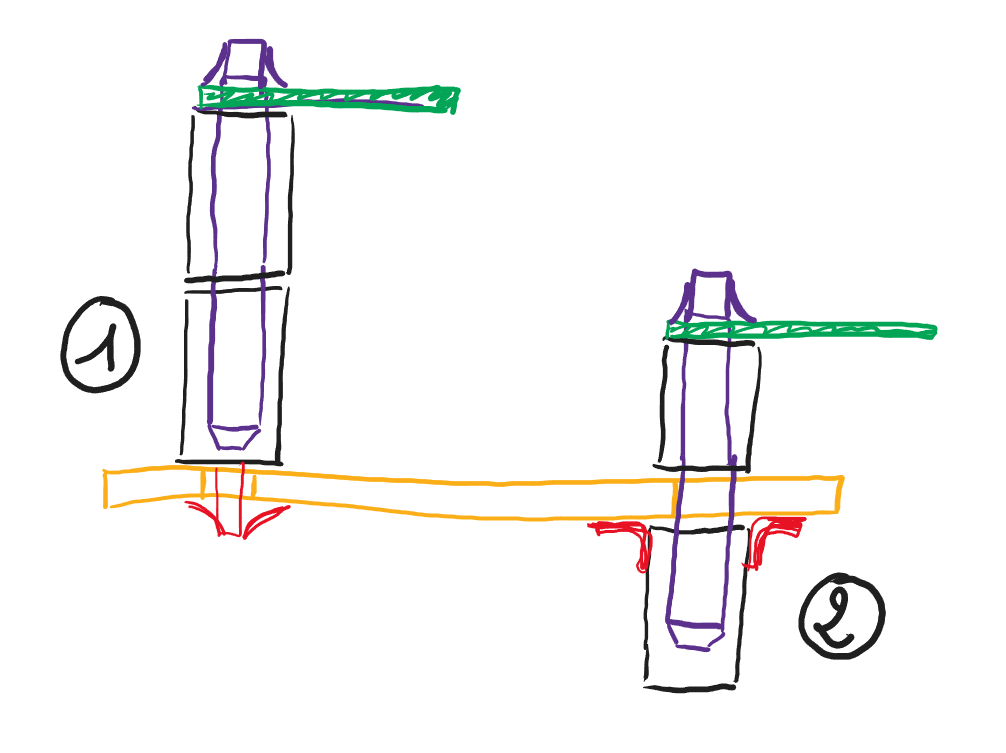
Gagner en hauteur sur le montage des drivers de moteur. Utiliser un montage par le dessous sur embase comme sur le dessin (2). Solution de connecteur chez Wurth:
Les Robots
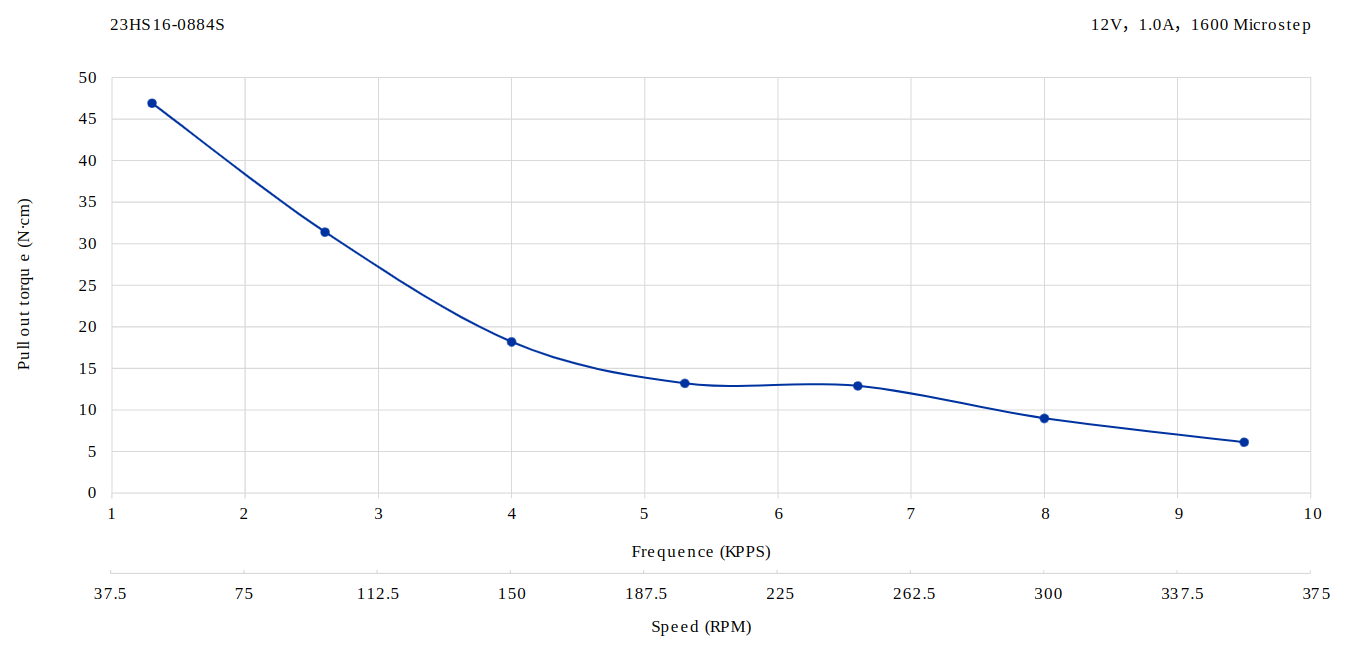
Les moteurs actuels, 23HS16-0884S, ne sont pas assez puissants en haute vitesse. Le couple chute drastiquement.
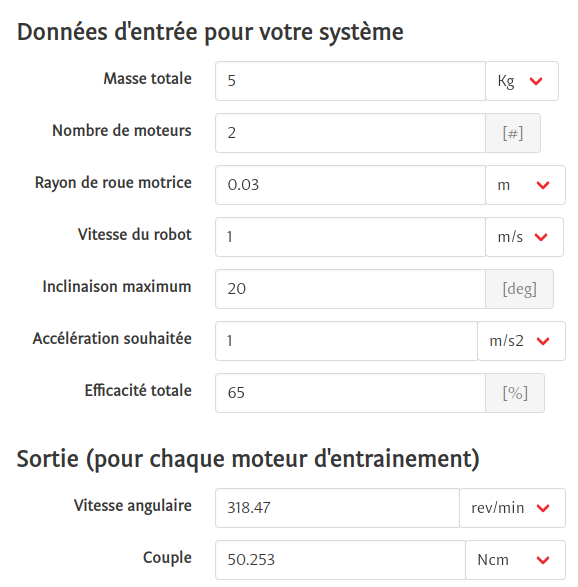
D’après notre calculateur, il nous faut un moteur capable d’un couple de 50N.cm à 318 tr/min (voir conditions d’entrées ci-après)
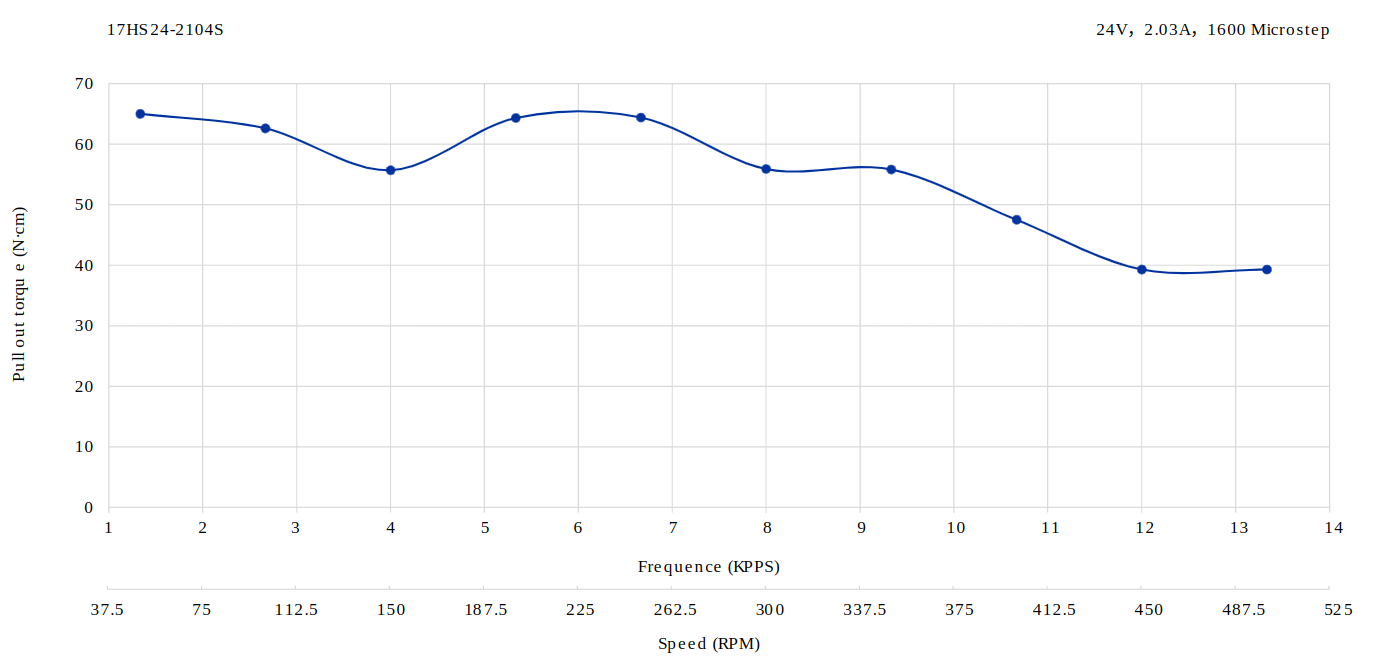
Si on souhaite rester en moteur Pas-à-pas pour le moment, la reférence semble 17HS24-2104S toute indiquée, et il existe des lots de 3 moteurs à des prix interessants.

- Numéro de pièce du fabricant: 17HS24-2104S
- Type de moteur: bipolaire
- Angle de pas: 1.8deg
- Couple de maintien: 65Ncm(92oz.in)
- Courant/phase: 2.1A
- Résistance/phase: 1.6ohms
Positionnement absolu
Liens importants
- recommandations pour cables I2C : https://docs.px4.io/main/en/assembly/cable_wiring.html#:~:text=I2C%20bus%20signal%20cross%2Dtalk,GND%20per%2030cm%20cable%20length.